
Rotational point groups in Laue classes
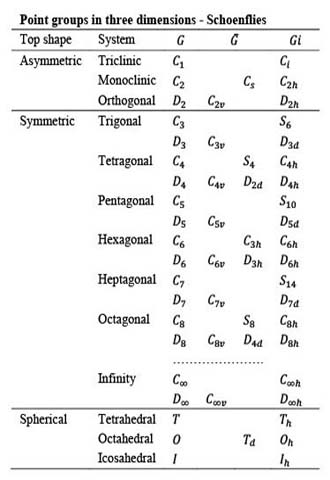
Molecular symmetry is described by an infinite number of three dimensional point groups that are categorised in the table on the right. Each point group in the table belongs to one of the asymmetric, symmetrict or spherical partitions and within this division to a system based on the main axial order of the group. Systems themselves are divided into one or two rows of Laue classes based on the rotational group (G) in the leftmost column of the table. Rotational point groups in the asymmetric and symmetric partitions are either cyclic groups of order n or dihedral groups of order 2n. Cyclic groups are symmetric about one axis about which rotations of 360/n degrees defines the symmetry and the order n of the rotation ranges from one to infinity. Dihedral groups have an additional 2-fold axis at right angles to the cyclic axis, doubling the order of the gropup. Point groups in the spherical partition have spatial transformations that move between three axes, requiring three rotatitonal orders that are not mutually at right angles.
Rotational groups in Laue classes
Non-rotational point groups in Laue classes
Each Laue class contains a set of 2,3 or 4 point groups defined by the rotational group G in the first column. Each class must also contain a group Gi that is simply the direct product of the rotational group for that class with space inversion (parity inversion). Gi is of twice the order of the rotational group and contains the space inversion operation itself. In addition to these two groups a Laue class might also contain one or two semi-direct product groups that formed by combining one of the rotational group generators with space inversion but Schoenflies shows these as combinations of rotational subgroups with mirror reflections. A cyclic group only has one generator so only one semi-direct group can be formed from it but a dihedral group is able to form two non-rotational groups in this way. Semi-direct product groups do not contain the spatial inversion element itself but direct product groups do. Groups in a Laue class have exactly the same abstract algebraic structure as their rotational group because inversion does not change the rotational component of the multiplication product. Obviously all groups in a Laue class have the same number of elements (the order) except for the direct product group Gi which has twice as many as the other groups. The tetrahedral and octahedral Laue classes are related to each other in a similar way to that of the cyclic and dihedral groups in the less symmetric partitions. All octahedral groups have an index-2 tetrahedral subgroup that provides an underlying symmetry.
Non-rotational groups in Laue classes
Irreducible representations
Symmetry operations in a three dimensional space can be described by matrices showing how atoms are permuted during the operation. Permutation representations produced in this way can always be reduced to a number of 1 dimensional irreducible representation (irreps) in the asymmetric partition, to a mixture of 1 and 2 dimensional irreps in the symmetric partition, going up to 3 dimensions in the spherical partition. Groups in a Laue class have the same irreducible representations because they are distinct manifestations of the same abstract group on which the irreps depend. Direct-product (centred) groups are direct products of the defining rotational group (or any other group in the class) and spatial inverson. their irreps are simple direct products of rotational group irreps and the spatial inversion irreps. A number of simple rules for deducing irreducible representations can be used to find irreps for a given molecule - the Byzantine calculations contained in a number of text books are just not necessary
Irrreducible representations in Laue classes
Relativistic (Double) point groups
All of the reasoning above relates to objects moving in a three dimensional space and has been found to work very well when applied to the electronic, vibrational and rotational motions in atoms and molecules. Unfortunately, as atoms become more massive in the middle of the periodic table electrons are drawn into the nucleus and travel much faster. Electrons in heavier atoms can travel at two-thirds of the speed of light, increasing their mass in line with the Lorentz equation. At this point the effects of special relativity become significant and have to be considered in energy level calculations. This is achieved by using the Dirac equation for atomic and molecular energy computation in much the same that the Schrodinger equation is used in three dimensions. Double point groups are symmetry groups for the Dirac equation and their deployment in Laue classes makes the whole description much easier.
Atomic orbitals
Treatments of atomic orbitals in three dimensions invariably rest on solutions to the 3D wave equation developed by Schrodinger. Extensions to 4D space-time use the Dirac equation. In both cases the equations produce pure one-electron orbital solutions that then act as bases for many-electron treatments. Simple crystal field theory can be applied to such orbitals to give a surprisingly good picture of how atomic energy levels may change in different environments.
Molecular orbitals
Electrons are disposed about a nucleus at distances and angles explained by the Schrodinger equation as orbitals surrounding the nucleus. Atoms combine to form molecules when these atomic orbitals combine to form molecular orbitals. Atomic orbital symmetry dictates the allowed molecular symmetries when these combinations occur. Transitions of electrons between the different energy levels of molecular orbitals is also dependent on molecular synmmetry
Molecular vibration
Molecules are considered to be semi-rigid so that atoms within them are able to stretch, contract and bend about an equilibrium position. The wave nature of vibrational motion can be treated as the motion of an harmonic oscillator and the energies of the allowed levels revealed by the Schrodinger equation. Allowed levels, which can be quite complex, are then labelled by the irreducible representations of the molecular point group
Molecular rotation
Molecular rotations depend on the moments of inertia in the molecule. In this context, partitions of asymmetric, symmetric and spherical molecules, have respectively 3, 2 and 1 distinct moments of inertia and show characteristic spectra. Again the Schrodinger equation is applied and rotational energy levels are obtained from the moments of inertia. It is difficult apply the equation to asymmetric molecules because of the three different inertias but quite simple to apply it to spherical molecules Rotational spectra are useful to probe mass and dimension within molecules but are not directly related to point groups.
Images of molecules belonging to each classes allow the various operations to be pictured.
The table above shows the three partions of a three dimensional space that chemists have described as a division between asymmetric, symmetric and spherical top molecules. Each partition is divided into systems containing one or two rows of Laue classes which, in the first two partitions, are either cyclic or dihedral classes. Cyclic classes have just one generator that creates symmetries around a single axis - usually taken to be the y axis. Dihedral classes contain groups that have a 2-fold generator at right angles to the cyclic generator. All the groups in an n-fold cyclic Laue class are of order n while those in an n-fold dihedral class are of order 2n but both of these values are doubled in the centred point group of the class. Each member of a Laue class has the same abstract algebraic structure except the centred group which is a direct product of the the structure with space inversion (parity inversion). Many physical applications of point group theory follow from this abstract structure so it is hard to overstate the importance of Laue classes.
The first column contains purely rotational point groups, the second and third contain semi-direct products of rotational groups with space inversion while the final column contains direct products with space inversion. Looking at rows of the Laue table of Schoenflies labeled point groups above, it is painfully obvious that individual groups have little to show that they belong to the same class. Schoenflies symbols almost always start with the rotational group of the point group being described and for the rotational groups themselves that issufficient. For non-rotational groups Schoenflies added vertical, horizontal and diagonal mirror plane subscripts to a rotational subgoup symbol. There are two major problems with this approach: mirror reflection is not a commutative operation so the order of the operations becomes a problem. Perhaps more importantly, this form of doubling up produces groups that have no algebraic relationship to each other. Schoenflies defined the S series of point groups that provides an ad-hoc exception to his initial rotational group symbols but, like most of his notation, it alternates between different structures. It is oobvious from the table above that some S groups are centrosymmetric, others are not. Many text books have pages of calculations using the "great orthoganality theorem" to navigate around Schoenflies notation.
Schoenflies 1891 system was replaced in crystallographic use following the introduction of the Hermann-Mauguin (International) system in 1931. This allowed each of the 230/219 (11 are enantiomorphic) three dimensional space groups to be described directly but provided no advantage for molecular work where point groups are sufficient. Although Hermann-Mauguin notation appears to use lot of reflections the fact that it fits into a structure of systems and Laue classes are defined by crysallographers as collections of point groups that show the same centred group in X-ray diffraction. Crystallographic point group symbols rely heavily on mirror reflections combined with spatial movement to produce "glide planes" in crystal symmetry. Instead of simply considering centrosymmetric groups as direct products of a group G with inversion i (G x i) crystallographers use a mass of reflections that are later combined with spatial translations.
Atomic and molecular work is more concerned with the algebraic structure of the point group in which reflections are something of a nuisance. This happens because the reflection operation (m) does not generally commute with a rotational operation (g) so gm and mg often produce different results. Inversion (i) on the other hand always produces the same result regardless of the order in which operations are applied because it commutes with all other operations. ie im and mi always produce the same result. This is why point groups are best gathered into Laue cl\asses. In effect, all groups in a Laue class are examples of the same abstract group. Describing point groups in this way makes computation much simpler.
Symmetry and point group references
There exists an enormous volume of literature on symmetry groups and their applications in crystallography and molecular work.
